






















































































Шаг винта 12mm(0.47244\")")
Шаг винта 12mm(0.47244\")")
Шаг винта 12mm(0.47244\")")
Шаг винта 12mm(0.47244\")")
Шаг винта 12mm(0.47244\")")
Шаг винта 12mm(0.47244\")")
Шаг винта 12mm(0.47244\")")
Шаг винта 12mm(0.47244\")")
Шаг винта 10mm(0.3937\")")
Шаг винта 10mm(0.3937\")")
Шаг винта 2mm(0.07874\")")
Шаг винта 2mm(0.07874\")")
Шаг винта 2mm(0.07874\")")
Шаг винта 2mm(0.07874\")")
Шаг винта 2mm(0.07874\")")
 Шаг 10mm(0.3937\") с Конечный выключатель")
Униполярный привод : различные обмотки двигателя возбуждаются последовательно по определенной схеме, но направление тока каждой обмотки всегда одинаково, что называется униполярным приводом.
Униполярная схема управления использует четыре транзистора для управления двумя фазами шагового двигателя. Структура обмотки статора двигателя состоит из двух наборов катушек с отводом от средней точки, как показано на рисунке 1. Весь двигатель имеет шесть проводов, подключенных к внешнему миру. Сторона переменного тока не может быть запитана одновременно (то же самое верно для стороны BD), в противном случае магнитные потоки, создаваемые двумя катушками на магнитном полюсе, будут компенсировать друг друга, что приведет только к потерям в меди катушки. Поскольку фактически у него только две фазы (обмотка переменного тока однофазная, и обмотка BD однофазная), правильным обозначением будет двухфазный шестипроводный шаговый двигатель.
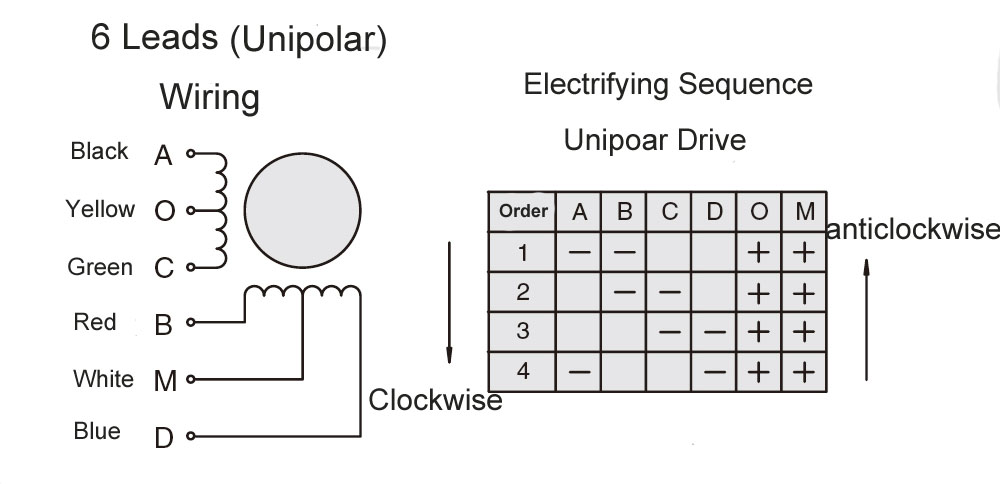
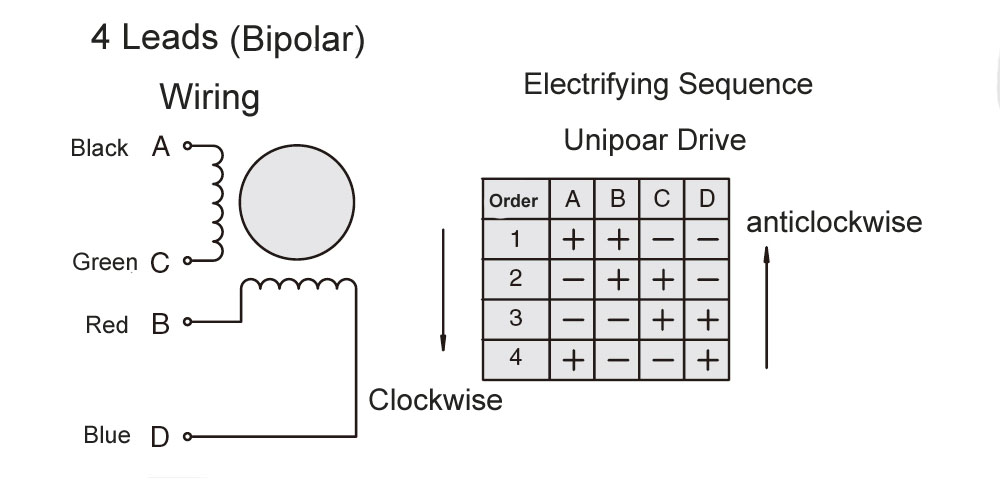
Схема управления биполярным шаговым двигателем показана на рисунке 2. Она использует восемь транзисторов для управления двумя наборами фаз. Магнитные полюса статора намотаны одной катушкой, а направление магнитного полюса переключается изменением направления тока в катушках AC и BD. На раннем этапе развития шаговых двигателей униполярные двигатели получили некоторую область применения благодаря стоимости полупроводниковых компонентов, поскольку им требовалось меньше транзисторов в схеме управления. Однако, с быстрым развитием полупроводниковых материалов в 1950-х и 1960-х годах, стоимость транзисторов значительно снизилась, и биполярные двигатели получили резкое увеличение использования благодаря своим преимуществам в производительности.
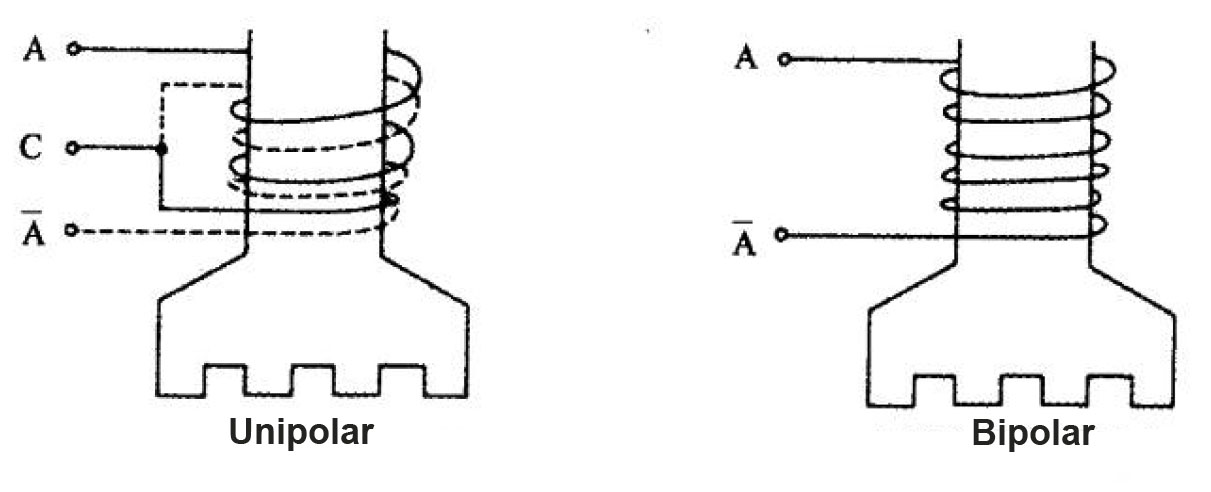
На рисунке 3 показаны два способа намотки: униполярный и биполярный. При одинаковом диаметре провода число витков обмотки катушки при униполярной намотке равно N, сопротивление — R, а число витков обмотки катушки при биполярной намотке — 2N, сопротивление катушки — 2R.
В следующей таблице сравнивается КПД униполярного и биполярного приводов в схеме постоянного напряжения на низких скоростях. Произведение тока на витки катушки называется ампер-витками и пропорционально крутящему моменту. Если скорость вращения обоих двигателей одинакова, выходная мощность пропорциональна ампер-виткам. Аналогично, биполярный ток равен V/2R, а количество витков также равно 2N, а произведение равно VN/R для униполярного привода. В случае управления постоянным входным напряжением сравнение униполярного и биполярного приводов показано в таблице ниже. Ток составляет лишь половину от униполярного, а КПД на низких скоростях вдвое выше, чем у униполярного.
Поэтому, когда требуется высокий крутящий момент в маломощных или низкоскоростных приложениях, следует использовать биполярный двигатель и драйвер. В высокоскоростных приложениях число витков биполярного двигателя увеличивается, индуктивность увеличивается, а противо-ЭДС увеличивается, что приводит к снижению тока и, следовательно, крутящего момента. Поэтому следует обратить внимание на сравнение крутящего момента с крутящим моментом униполярного двигателя.
| Униполярный | Биполярное расстройство | |
| Ампер Т-витки | U1=V*N/R | U2=V*2N/2R=V*N/R |
| Входная мощность | W1=V²/R | W2=(V/2R)²*2R=V²/2R |
| Эффективность | η=U1/W1=N/V | η=U2/W2=2N/V |
Примечание: V — приложенное напряжение; R — сопротивление катушки двигателя; N — количество однополюсных витков.
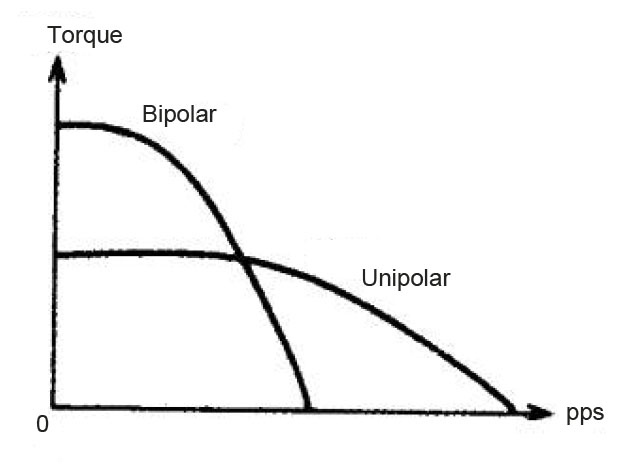
На рисунке 4 показаны характеристики униполярного и биполярного шаговых двигателей, оба из которых используют один и тот же режим управления постоянным током. Как правило, для низкоскоростных и высококрутящих нагрузок используются биполярные двигатели, а для высокоскоростных — униполярные.
, 0,3 А, 42 x 42 x 34 мм, 6 проводов")
 0,3 А 42x42x34 мм 6 проводов")
 0,4 А 42x42x39 мм 6 проводов")
, 0,4 А, 42 x 42 x 48 мм, 6 проводов")
 3 А 57x57x56 мм 8 проводов")
 4A 57x57x84 мм 8 проводов")
 4 А 57x57x84 мм 8 проводов")
, 60x60x100 мм, 8 проводов")
