























































































Статья расскажет вам всё о шаговых двигателях
Нажмите, пожалуйста, непосредственно на интересующую вас главу.
● Что такое шаговый двигатель?
Шаговый двигатель — это бесщёточный синхронный двигатель постоянного тока, преобразующий цифровые импульсы во вращение механической оси. В отличие от многих других стандартных типов двигателей, шаговый двигатель не вращается непрерывно до тех пор, пока не будет отключено постоянное напряжение. Он имеет несколько обмоток, объединённых в группы, так называемые «фазы». При поочередном включении каждой фазы двигатель вращается шаг за шагом.
Шаговые двигатели разделяют всё вращательное движение на несколько равных шагов. Если мощность двигателя соответствует крутящему моменту и скорости, его положение можно контролировать, чтобы он перемещался на одном из этих шагов и оставался в этом положении без обратной связи от датчика положения.
Кроме того, шаговый двигатель — это устройство цифрового ввода и вывода. Он особенно подходит для приложений, в которых управляющий сигнал представлен в виде цифровых импульсов, а не аналоговых напряжений. Цифровой импульс, подаваемый на драйвер шагового двигателя, заставляет двигатель увеличивать угол поворота. С увеличением частоты цифровых импульсов шаговое движение становится непрерывным вращением.
Благодаря компьютерному управлению шаговыми двигателями можно добиться очень точного позиционирования и/или управления скоростью. В результате шаговые двигатели стали предпочтительным решением для многих задач точного управления движением.
● Как работает шаговый двигатель?
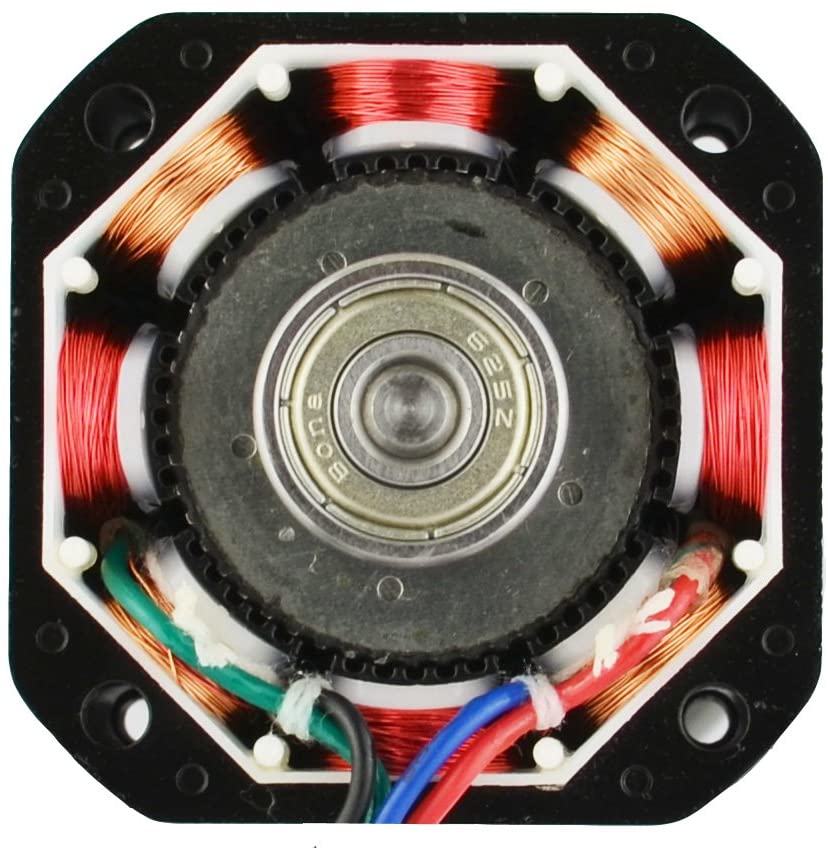
Когда ток протекает через обмотку статора, обмотка статора создает векторное магнитное поле. Это магнитное поле будет заставлять ротор вращаться на определенный угол так, чтобы направление магнитного поля ротора совпадало с направлением магнитного поля статора. Когда векторное магнитное поле статора вращается на угол. Ротор также вращается под углом к этому магнитному полю. Каждый раз, когда подается электрический импульс, двигатель поворачивается на угол и продвигается вперед на один шаг. Его выходное угловое смещение пропорционально количеству входных импульсов, а его скорость вращения пропорциональна частоте импульсов. Измените порядок подачи питания на обмотки, и двигатель изменит направление вращения. Таким образом, вращением шагового двигателя можно управлять, управляя числом импульсов, частотой и последовательностью подачи питания на каждую фазную обмотку двигателя.
Двигатели распространённых типов имеют железные сердечники и обмотки внутри. Обмотка обладает сопротивлением и приводит к потерям при подаче электричества. Величина потерь пропорциональна сопротивлению и квадрату тока. Это то, что мы часто называем потерями в меди. Если ток не является стандартным постоянным или синусоидальным, также будут возникать гармонические потери; железный сердечник будет иметь гистерезис. Эффект вихревых токов также приводит к потерям в переменном магнитном поле, и их величина зависит от материала, тока, частоты и напряжения. Это называется потерями в стали.
Потери в меди и железе возникают в виде тепла, что влияет на эффективность двигателя. Шаговые двигатели, как правило, обеспечивают точность позиционирования и высокий крутящий момент, но их КПД относительно низок. Ток, как правило, больше и имеет более высокий уровень гармоник. Частота переменного тока также изменяется с изменением скорости вращения. Поэтому шаговые двигатели часто нагреваются сильнее, чем обычно.
Двигатель преобразует электрическую энергию в механическую, а шаговый двигатель представляет собой элемент управления с разомкнутым контуром, который преобразует электрические импульсные сигналы в угловое или линейное перемещение. В условиях отсутствия перегрузки скорость двигателя и положение останова зависят только от частоты и количества импульсов импульсного сигнала и не зависят от изменения нагрузки. Другими словами, при подаче импульсного сигнала на двигатель двигатель повернётся на угол шага. Наличие этой линейной зависимости в сочетании с характеристиками шагового двигателя, который имеет только периодические ошибки и не имеет накопленных ошибок, значительно упрощает использование шаговых двигателей для управления скоростью, положением и другими областями управления.
● Размер шагового двигателя
Шаговые двигатели классифицируются по размеру корпуса, например, «Nema 17» или «Nema 23». Вы когда-нибудь задумывались, как это происходит и что это означает? Американская ассоциация производителей электрооборудования устанавливает стандарты для многих электротехнических изделий, включая шаговые двигатели. Как правило, «Nema 17» означает, что площадь монтажной поверхности двигателя составляет 1,7 квадратных дюйма. Следовательно, размеры шагового двигателя Nema 23 составляют 2,3 квадратных дюйма, или 57 мм, как показано ниже.
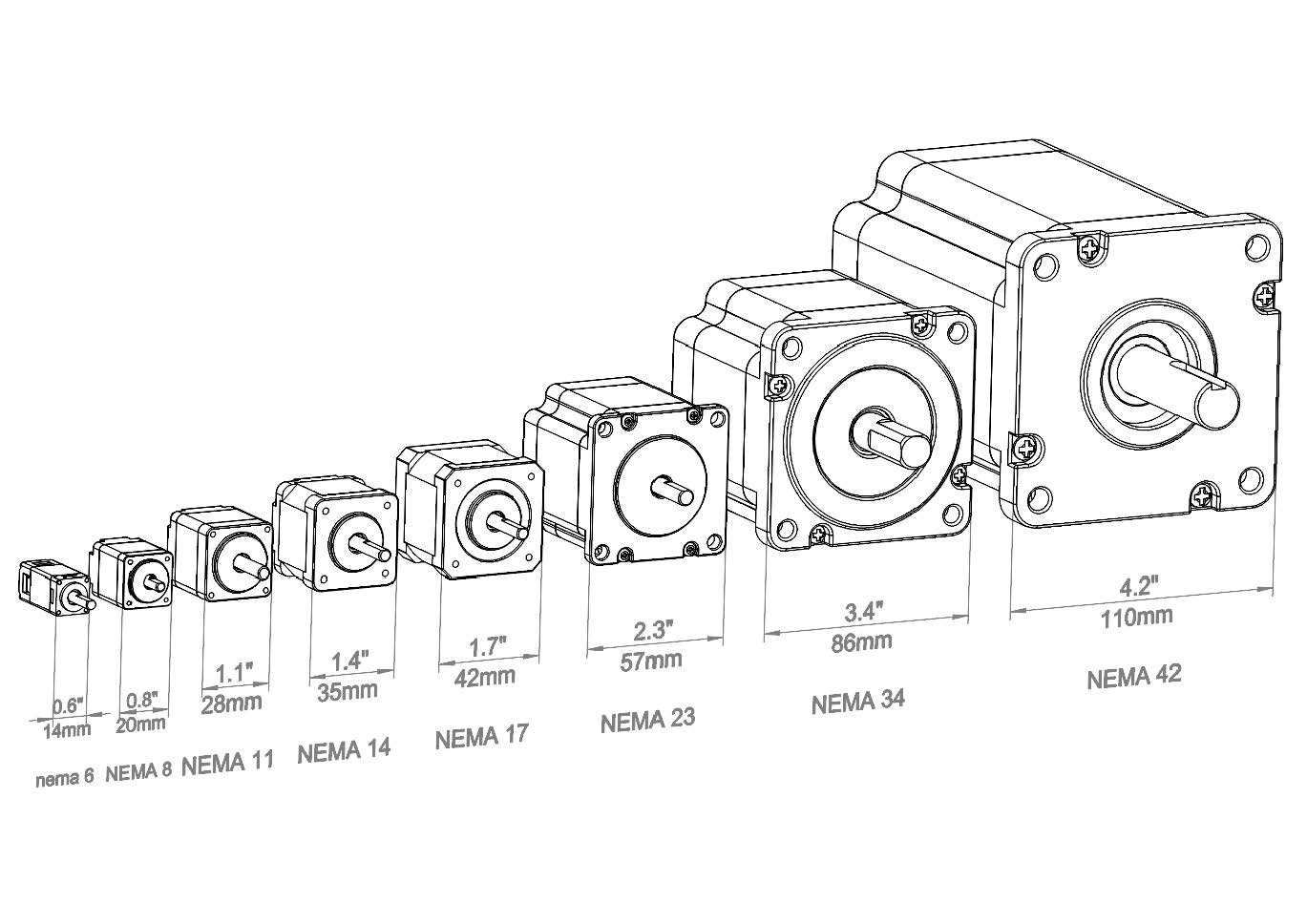
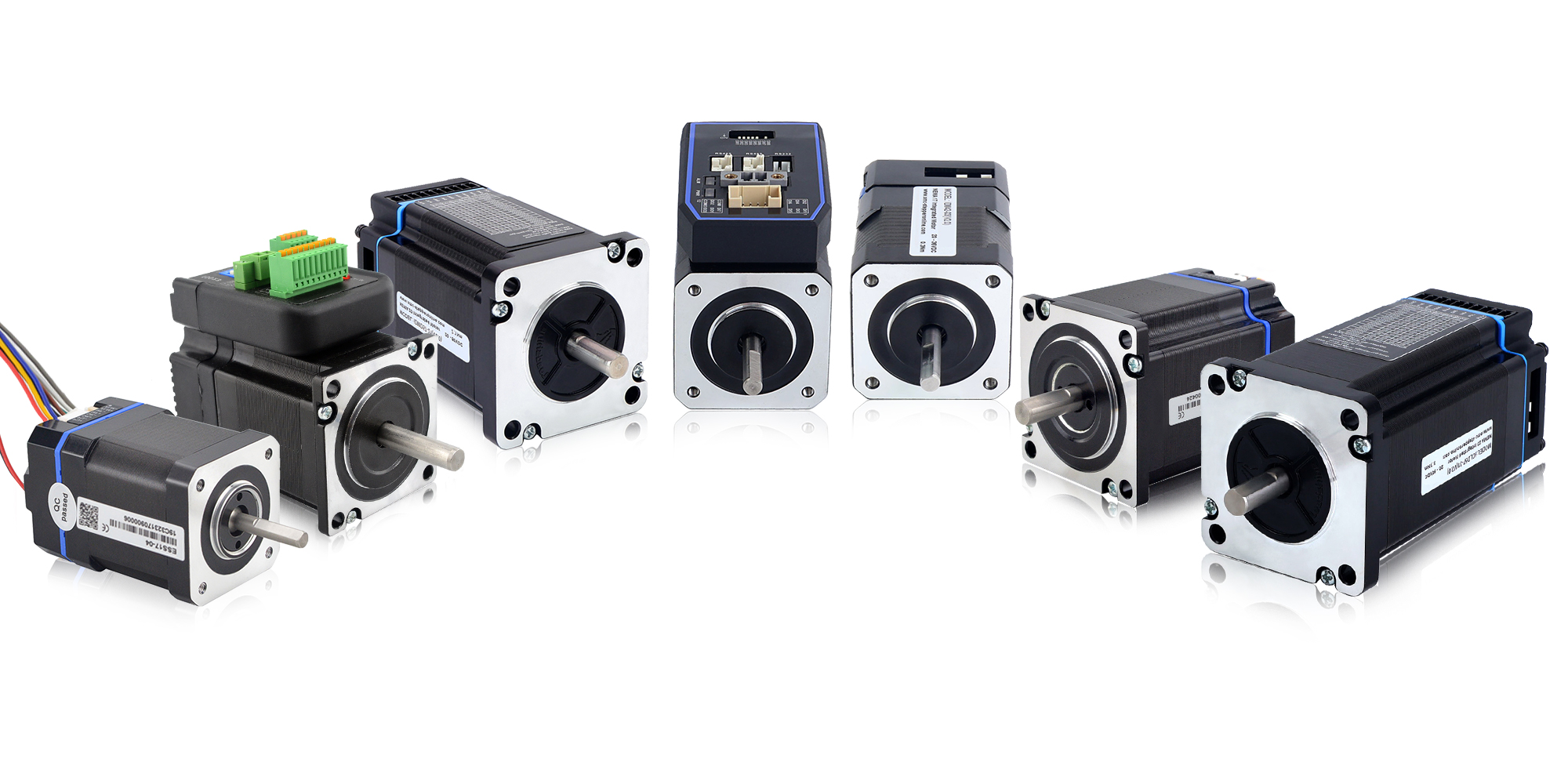
На фотографии ниже представлены шаговые двигатели Nema типоразмеров 06, 08, 11, 14, 17, 23, 24, 34 и 42. Размер 24 — это своего рода аномалия: официального определения Nema для него нет. Он устанавливается аналогично размеру 23, но немного шире (примерно 4 мм), что позволяет использовать более крупные роторы и статоры и, следовательно, увеличивать крутящий момент примерно на 30%.

По сути, производители соглашаются с предлагаемым стандартом. Это даёт им большую гибкость в проектировании, поскольку они заранее знают, что один двигатель Nema 17 подойдёт к другому узлу Nema 17 без необходимости что-либо переделывать, особенно если они решат сменить поставщика двигателей.
● Типы шаговых двигателей
Компания STEPPERONLINE продает множество типов шаговых двигателей, и понимание характеристик и сфер применения различных типов шаговых двигателей поможет вам решить, какой тип подходит вам лучше всего.
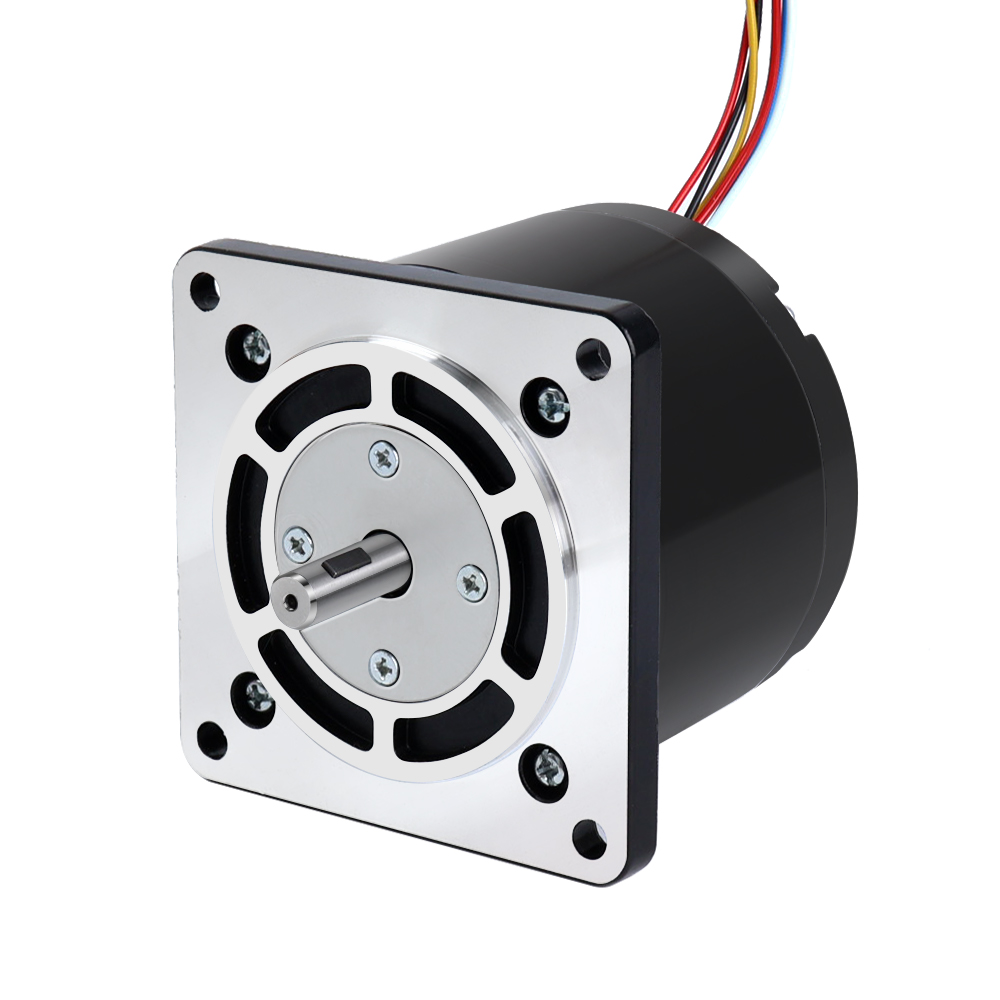
Гибридный шаговый двигатель представляет собой комбинацию двигателя с переменным магнитным сопротивлением и двигателя с постоянными магнитами. Статор возбуждается электромагнитным полем, как в шаговом двигателе с переменным магнитным сопротивлением, а ротор шагового двигателя намагничивается в осевом направлении, как в шаговом двигателе с постоянными магнитами. Этот шаговый двигатель представляет собой привод, преобразующий электрические импульсы в угловое перемещение.
По сравнению с двумя другими типами шаговых двигателей, гибридные шаговые двигатели обеспечивают более высокий крутящий момент при меньшем угле шага и обладают лучшими динамическими характеристиками. Благодаря развитию науки и техники, особенно в области материалов с постоянными магнитами, полупроводниковых технологий и компьютерных технологий, эти шаговые двигатели нашли широкое применение в промышленной автоматизации, робототехнике, текстильной и медицинской промышленности.
● Шаговый двигатель с замкнутым контуром
Шаговый двигатель с замкнутым контуром — это шаговый двигатель с энкодером, установленным на конце двигателя для обеспечения замкнутого контура управления. Замкнутый контур управления шаговым двигателем представляет собой сервосистему, использующую обратную связь по положению и/или скорости для определения изменения фазы, соответствующего положению ротора, что может значительно улучшить характеристики шагового двигателя без потери шагов.
Шаговый двигатель с замкнутым контуром имеет двухобмоточную конструкцию и оснащен высокоточным линейным энкодером. Каждый раз, когда двигатель совершает один оборот, энкодер выдает импульс, что позволяет точно определить положение вращения двигателя, в то время как обычные шаговые двигатели имеют только один контур. Точное определение положения обмотки и вращения двигателя ненадежно.

В шаговом двигателе с замкнутым контуром управления используется управление с защелкой, требующее подачи опорного импульса. Благодаря управлению с обратной связью управляющий импульс может быть синхронизирован. Положение вращения двигателя может поддерживаться постоянным, в то время как в обычном шаговом двигателе используется управление с разомкнутым контуром, и ему не требуется подача опорного импульса. Необходимо контролировать только частоту и направление шага двигателя, а положение вращения двигателя не контролируется.
По сравнению с обычными шаговыми двигателями, шаговые двигатели с замкнутым контуром обладают более высокой динамической реакцией и обеспечивают точное управление положением вращения с малыми погрешностями позиционирования. Более того, они обладают высокой точностью, а точность позиционирования может регулироваться с точностью до 0,1 градуса, в то время как точность позиционирования обычных шаговых двигателей составляет всего 1 градус, что приводит к низкой стабильности работы и большим погрешностям позиционирования.
Кроме того, шаговые двигатели с замкнутым контуром имеют более высокую грузоподъемность и могут выдерживать большие нагрузки, в то время как обычные шаговые двигатели имеют меньшую грузоподъемность и худший срок службы.
● Интегрированный шаговый двигатель
Интегрированные шаговые двигатели объединяют шаговые приводы и двигатели в одном устройстве. Интегрированные шаговые двигатели отличаются компактной конструкцией, что сокращает количество проводов и снижает затраты по сравнению с раздельными компонентами двигателя и привода. Они идеально подходят для таких применений, как упаковка и маркировка, автоматизированные испытания и измерения, автоматизированная сборка и биологические науки.
К другим преимуществам интеграции двигателей и приводов относятся простота внедрения, упрощение проводки, более быстрая настройка и проектирование системы, а также гарантированная совместимость двигателя и привода.
● Шаговый двигатель с постоянными магнитами
В двигателях с постоянными магнитами ротор оснащен постоянным магнитом (ПМ), работающим за счёт притяжения или отталкивания между магнитом ротора и электромагнитами статора. Ротор шагового двигателя с постоянными магнитами изготовлен из стали, предназначенной для постоянного магнита. Статор шагового двигателя штампуется в форме зубца, а ротор изготовлен из стали, предназначенной для постоянного магнита, с радиальным многополюсным намагничиванием. Магнитное поле, создаваемое направлением тока в катушке, взаимоисключающее с магнитным полем ротора, что обеспечивает вращение двигателя в обратном направлении.
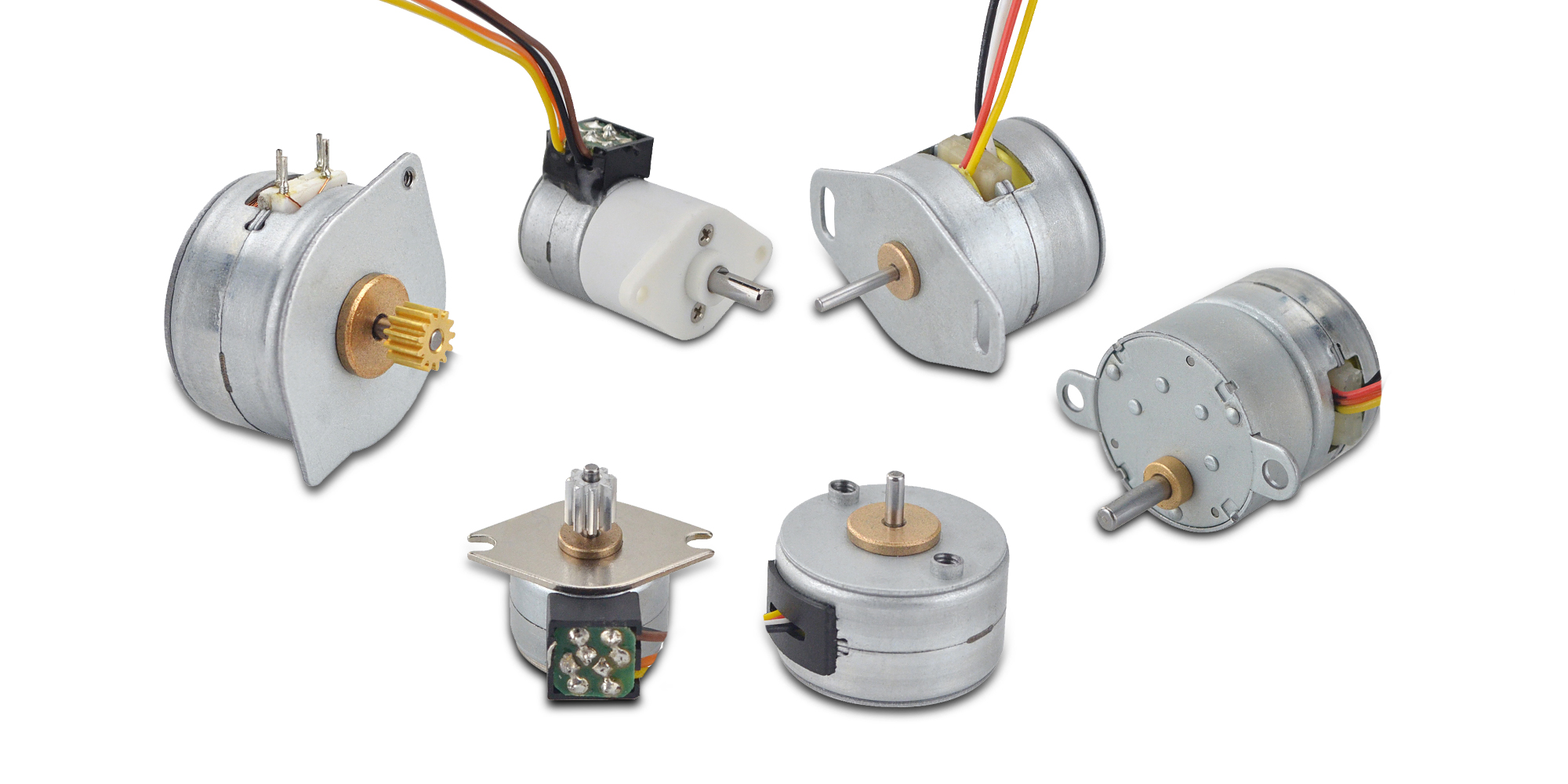
Этот шаговый двигатель также известен как шаговый двигатель с постоянными магнитами (PM). Осевое направление статора и ротора двигателя разделено на две секции, средняя из которых отделена магнитной перегородкой. Эти две секции разделены между собой углом шага, каждая из которых состоит из статора, ротора и кольцевой обмотки, намотанной на статор. Шаговый двигатель с постоянными магнитами в основном используется в периферийном компьютерном оборудовании, фотосистемах, оптоэлектронных комбинационных устройствах, системах управления клапанами, ядерных реакторах, банковских терминалах, станках с ЧПУ, автоматических заводных машинах, электронных часах, медицинском оборудовании и т.д.
● Шаговый двигатель с переменным магнитным сопротивлением
Шаговый двигатель с переменным магнитным сопротивлением — это тип электродвигателя, работающего по принципу магнитного сопротивления. Этот двигатель состоит из железного ротора и нескольких обмоток статора. Обмотки намагничиваются в определённой последовательности, заставляя ротор двигаться дискретными шагами.
Шаговые двигатели с переменным магнитным сопротивлением обеспечивают высокую частоту шагов и хороший крутящий момент на низких скоростях. Однако на более высоких скоростях производительность может быть ниже из-за резонанса.
Шаговые двигатели с переменным магнитным сопротивлением считаются прочными и надежными, что делает их пригодными для сред, в которых двигатель может подвергаться воздействию тяжелых условий.
Одним из основных недостатков шаговых двигателей с переменным магнитным сопротивлением является их, как правило, более высокий уровень шума по сравнению с другими типами шаговых двигателей. Это связано с плохим демпфированием ротора, что приводит к более высокому уровню механических вибраций.
Линейные шаговые двигатели – это особый тип шаговых двигателей, конструкция и принцип работы которых отличаются от традиционных вращательных шаговых двигателей. Линейный шаговый двигатель – это линейный двигатель, который осуществляет линейное перемещение посредством линейного движения, а не вращательного, как традиционные шаговые двигатели. Конструкция линейного шагового двигателя обычно состоит из неподвижного статора и подвижного ползуна. Статор оснащён катушками внутри, а ползун – постоянными магнитами. При прохождении тока через катушку статора создаётся магнитное поле. Взаимодействие между постоянным магнитом на ползуне и магнитным полем статора создаёт силу притяжения или отталкивания, заставляя ползунок линейно перемещаться по неподвижной оси. Управление линейным шаговым двигателем аналогично управлению традиционным шаговым двигателем. Управляя направлением и величиной тока, можно управлять положением и скоростью ползуна. Импульсный сигнал каждого шагового двигателя перемещает ползунок на фиксированный шаг, что позволяет добиться точного линейного перемещения.

Существует три распространённых типа линейных шаговых двигателей: с внешним приводом, со сквозным валом и с фиксированным валом. Выбор типа двигателя зависит от ключевых характеристик конкретного применения. Линейные шаговые двигатели обладают такими преимуществами, как высокая точность, безлюфтовая передача и быстрое реагирование, поэтому они предпочтительны в приложениях, требующих высокопроизводительного управления линейным перемещением.
● Униполярное и биполярное расстройства
Шаговый двигатель — это двигатель, управляющий углом поворота посредством электрических импульсов. Биполярные и униполярные шаговые двигатели — два распространённых типа шаговых двигателей. Основное различие между ними заключается в способе управления. Биполярному шаговому двигателю для изменения направления вращения ротора требуется изменение направления тока, поэтому для управления направлением вращения требуются четыре электрода, каждый из которых имеет два состояния (ВКЛ/ВЫКЛ).
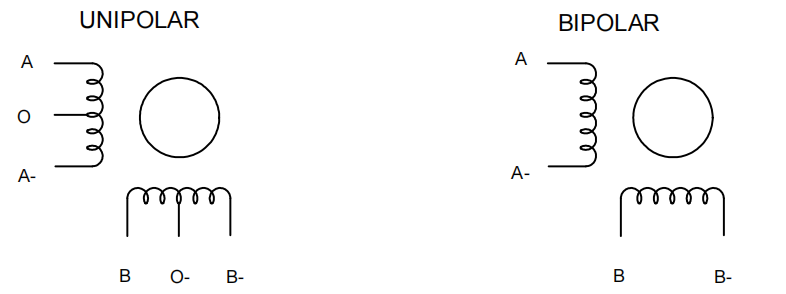
Униполярному шаговому двигателю требуется всего два электрода для управления вращением ротора, и двигатель вращается за счёт изменения направления тока. Таким образом, по сравнению с биполярными шаговыми двигателями, униполярным шаговым двигателям требуется всего два электрода для достижения такого же уровня управления движением. Однако, поскольку для униполярных шаговых двигателей требуется добавление униполярного драйвера в схему управления, сложность схемы несколько выше.
Биполярные и униполярные шаговые двигатели имеют свои преимущества и недостатки, и подходящий двигатель можно выбрать в соответствии с конкретным сценарием применения.
Преимуществами биполярных шаговых двигателей являются большой крутящий момент, высокая скорость, высокая точность и простота управления, поэтому они часто используются там, где требуется высокоскоростное и высокоточное управление. Крутящий момент и точность униполярных шаговых двигателей сравнимы с показателями биполярных. Они хуже и медленнее. Кроме того, драйверы, используемые в униполярных шаговых двигателях, дороги и имеют меньше возможностей.
● Как выбрать шаговый двигатель, драйвер и блок питания?
Шаговые двигатели — хороший выбор, когда требуется управление движением. Их можно использовать в ситуациях, когда требуется контролировать угол поворота, скорость, положение и синхронизацию.
Итак, при выборе шагового двигателя необходимо учитывать несколько факторов.
1. Как двигатель соединен с нагрузкой?
Определив тип соединения двигателя с нагрузкой, вы можете выбрать шаговый двигатель по длине, диаметру и типу вала. В настоящее время STEPPERONLINE предлагает стандартные шаговые двигатели с валами различной длины, диаметра и типа, а также различные варианты исполнения вала двигателя, подходящие под ваши требования.2. Насколько быстро должен двигаться или ускоряться груз?
При выборе подходящего двигателя необходимо учитывать баланс скорости и нагрузки. Для некоторого оборудования, требующего быстрого перемещения, можно выбрать высокоскоростные двигатели, но при большей нагрузке требуется двигатель с большим крутящим моментом. Поэтому при выборе двигателя необходимо учитывать баланс скорости и нагрузки в соответствии с фактическими потребностями и выбирать двигатель, который соответствует как скорости перемещения, так и нагрузке. Ниже приведены максимальная и рекомендуемая скорость для двигателей каждого типоразмера на холостом ходу.
| Скорость без нагрузки | |||
| Тип двигателя | Размеры (мм) | Макс. скорость (об/мин) | Рекомендуемая рабочая скорость (об/мин) |
| Двигатель открытого контура | Нема 6(14x14) | 1000 | 100-600 |
| Нема 8(20x20) | 1000 | 100-600 | |
| Нема 11(28x28) | 1000 | 100-600 | |
| Нема 14(35x35) | 1000 | 100-600 | |
| Нема 16(40x40) | 1000 | 100-500 | |
| Нема 17(42x42) | 1000 | 100-500 | |
| Нема 23(57x57) | 1000 | 100-500 | |
| Нема 24(60x60) | 1000 | 100-500 | |
| Нема 34(86x86) | 1000 | 100-400 | |
| Нема 42(110x110) | 500 | 100-300 | |
| Двигатель с замкнутым контуром | Нема 8(20x20) | 2000 | 100-1500 |
| Нема 11(28x28) | 2000 | 100-1500 | |
| Нема 14(35x35) | 2000 | 100-1000 | |
| Нема 17(42x42) | 2000 | 100-1000 | |
| Нема 23(57x57) | 1500 | 100-1000 | |
| Нема 24(60x60) | 1500 | 100-1000 | |
| Нема 34(86x86) | 1500 | 100-1000 | |
С помощью диаграммы характеристик двигателя вы также можете определить, соответствует ли двигатель вашим требованиям к скорости нагрузки.
3. Какой крутящий момент необходим для перемещения груза?
У большинства двигателей есть номинальный крутящий момент. Именно на него нужно обращать внимание, чтобы решить, достаточно ли мощности у двигателя для достижения желаемого результата. Удерживающий крутящий момент шагового двигателя аналогичен «мощности» обычного двигателя. Однако физическая структура шаговых двигателей полностью отличается от двигателей переменного и постоянного тока, и выходная мощность двигателя зависит от скорости, тока и входного напряжения.
Как правило, если требуемый крутящий момент менее 0,8 Н·м, следует выбирать двигатели Nema 8 (20 x 20 мм), Nema 11 (28 x 28 мм), Nema 14 (35 x 35 мм), Nema 16 (39 x 39 мм), Nema 17 (42 x 42 мм); если крутящий момент составляет около 1 Н·м, следует выбирать шаговый двигатель Nema 23. Если крутящий момент превышает несколько Н·м, следует выбирать шаговый двигатель с характеристиками, такими как Nema 34 и Nema 42.
4. Какая точность требуется при позиционировании груза?
Точность шаговых двигателей возрастает с уменьшением шага. Это происходит потому, что один оборот делится на более точные и многочисленные шаги, что оставляет меньше места для ошибки. Например, шаговый двигатель с углом 0,9° обеспечивает более высокую точность, чем шаговый двигатель с углом 1,8°.
Распространенное заблуждение заключается в том, что двигатели с шагом 1,8°, работающие на половинном шаге, обеспечат ту же точность, что и двигатели с шагом 0,9°, работающие на полном шаге. Другое заблуждение заключается в том, что при использовании двигателя с шагом 0,9° теряется крутящий момент. Эти предположения неверны, и понимание особенностей механической конструкции может объяснить, почему.
Как правило, шаговые двигатели с шагом 0,9° лучше всего подходят для высокоскоростных и высокоточных приложений. В свою очередь, шаговые двигатели с шагом 1,8° обеспечивают более высокий крутящий момент, но более низкую точность. Также доступны шаговые двигатели с шагом 0,9° запатентованной 12-полюсной конструкции. Эти более совершенные двигатели сочетают в себе особенности двигателей с шагом 0,9° и 1,8° и обеспечивают высокую точность и более высокий крутящий момент.
● Выберите драйвер шагового двигателя
Чтобы максимально эффективно использовать шаговый двигатель, необходимо использовать подходящий драйвер. При выборе драйвера следует учитывать три ключевых параметра: напряжение, ток, микрошаг и количество фаз. Каждый из них играет важную роль в работе двигателя. Неучёт этих параметров может привести к снижению производительности, повышению уровня шума или даже к перегреву и выходу двигателя из строя, что, в свою очередь, приводит к потере производственного времени и увеличению затрат на обслуживание.
1. Номинальное напряжение
Превышение максимального номинального напряжения двигателя или работа двигателя с более высоким напряжением питания может привести к его неисправности. По этой причине при выборе драйвера шагового двигателя необходимо знать максимальное номинальное напряжение или типичное номинальное напряжение двигателя из описания продукта или кривой крутящего момента. Шаговые двигатели обычно питаются от драйверов, работающих от переменного тока (120 В или 240 В) или постоянного тока низкого напряжения (например, 24 В, 36 В или 48 В). Если двигатель работает при более высоком напряжении, чем указано в спецификации, например, двигатель, рассчитанный на 24 В постоянного тока, при высоком напряжении, двигатель быстро перегреется. И наоборот, двигатель, работающий при слишком низком напряжении (например, двигатель высокого напряжения, работающий при 24 В постоянного тока), будет вырабатывать меньше мощности и может привести к остановке двигателя, если нагрузка не будет снижена.
2. Текущий рейтинг
Убедитесь, что драйвер подходит для широкого диапазона токов, чтобы вы могли протестировать систему при различных напряжениях, подходящих для вашего применения. При выборе номинального тока следует учитывать как постоянный или эффективный ток, так и пиковый ток. В коллекторных и бесколлекторных двигателях постоянного тока противо-ЭДС отсутствует во время пуска и остановки, и драйвер воспринимает только сопротивление обмотки двигателя. Поэтому перед раскруткой двигателя возникает бросок тока, создающий противо-ЭДС, противоположную напряжению питания, что снижает потребление тока. Даже если вашему приложению требуется не более 1 А постоянного тока в нормальном режиме работы, при запуске и остановке ему может потребоваться ток в 2-3 раза больше или даже больше.
3. Микрошаг
Шаговые двигатели обычно движутся с шагом 1,8°, то есть 200 шагов на оборот. Это может стать проблемой, если нам нужны небольшие перемещения. Одним из вариантов может быть использование редуктора, но есть и другой вариант — микрошаговый режим. Микрошаговый режим означает, что мы можем делать более 200 шагов на оборот, а значит, и меньшие перемещения.
При работе шаговых двигателей с полным шагом выходной сигнал драйвера шагового двигателя выглядит как прямоугольный сигнал и генерирует грубые перемещения. Чем больше микрошаги, тем больше выходной сигнал похож на синусоиду, и шаговый двигатель движется более плавно. Однако это имеет и недостаток. С увеличением значения микрошага крутящий момент резко падает, и если значение слишком велико, двигатель не может генерировать достаточный крутящий момент для вращения. Обычно для достижения удовлетворительной плавности перемещения и обеспечения достаточного крутящего момента можно использовать значения 1/4, 1/8 или даже 1/16.
4. Количество фаз
Драйверы шаговых двигателей используются для управления определённым количеством фаз. Для типичных униполярных и биполярных шаговых двигателей используются двухфазные приводы, а для двигателей с переменным магнитным сопротивлением — трёхфазные. Перед выбором драйвера проверьте количество фаз двигателя.
При использовании шагового двигателя вам понадобится источник питания. Правильный источник питания обеспечит оптимальную работу шагового двигателя. Неправильный источник питания может привести к снижению производительности или большим потерям энергии.
Ниже приведены несколько советов по выбору блока питания:
| Размер двигателя | Напряжение возбуждения |
| Нема 8 - Нема 17 | 12 - 24 В постоянного тока |
| Нема 23, Нема 24 | 24 - 48 В постоянного тока |
| Нема 34 | 48 - 100 В постоянного тока/30 - 70 В переменного тока |
| Нема 42 - Нема 52 | 110 - 220 В переменного тока |
- Проверьте номинальный ток двигателя. Его можно найти в техническом описании двигателя.
- Проверьте напряжение питания. Напряжение питания — главный фактор при выборе блока питания. Как правило, чем выше напряжение, тем выше производительность.
Ниже в таблице приведены рекомендуемые напряжения для шаговых двигателей. Вы можете выбрать подходящее напряжение в соответствии с вашими требованиями.
Рассчитайте значение мощности. Мы предлагаем вам простую формулу:
П=н*И*В*1,2P: Значение мощности
n: Количество шаговых двигателей
I: Номинальный ток двигателя
V: Напряжение возбуждения
1.2: означает 20% маржи
Например, 3 блока двигателей с номинальным током 3 А каждый и напряжением питания 36 В, расчетная мощность составит примерно: 3 * 3 А * 36 В * 1,2 = 388,8 Вт. Таким образом, вы можете выбрать источник питания 36 В 400 Вт.
Обратите внимание: формула представляет собой лишь приблизительное значение мощности. В зависимости от условий работы мощность может отличаться. Например, в трёхосной системе не все три двигателя работают одновременно и не все три двигателя работают с максимальной нагрузкой и т. д. В этом случае значение мощности может быть ниже значения, рассчитанного по формуле.
● Преимущества и недостатки шаговых двигателей
Преимущества шаговых двигателей
- Благодаря своей внутренней структуре шаговые двигатели не требуют датчиков для определения положения. Поскольку двигатель движется «шагами», его положение в определённый момент времени можно определить, просто подсчитав эти шаги.
- Шаговые двигатели также очень просты в управлении. Хотя для двигателя требуется драйвер, для его корректной работы не требуется сложных вычислений или настроек. В целом, объём работы, требуемый для управления, ниже, чем у других двигателей. Метод микрошагового управления позволяет достичь высокой точности позиционирования — до 0,007°.
- Шаговые двигатели обеспечивают большой крутящий момент на низкой скорости, отлично удерживают положение и имеют длительный срок службы.
- Ротор шагового двигателя имеет большую массу и высокую инерцию. Он подвержен вибрации и шуму при работе на высоких скоростях, что влияет на стабильность и точность движения. Это является существенным недостатком шаговых двигателей, и необходимо принимать меры для его снижения или устранения.
- Принцип работы шагового двигателя заключается в управлении положением и скоростью посредством кратковременного импульсного управления. Длительная работа может привести к перегреву двигателя или даже его перегоранию. Для задач, требующих непрерывной работы в течение длительного времени, шаговые двигатели могут оказаться не лучшим выбором.
Применение и применение шаговых двигателей
Благодаря своим характеристикам шаговые двигатели используются во многих приложениях, требующих простого управления положением и способности его поддерживать, в том числе:
1. 3D-принтеры
Шаговый двигатель — один из важных компонентов 3D-принтера. В зависимости от типа принтера, они могут использоваться для различных целей. Например, шаговые двигатели используются для индивидуального перемещения экструдера или рабочей платформы по осям X, Y и Z. Обычно экструдер оснащён шаговым двигателем, который подаёт пластиковую нить в экструдер.
Шаговые двигатели уникальны тем, что могут перемещаться на заданный интервал и затем оставаться в этом положении. Поскольку они способны многократно перемещать объекты в фиксированное положение, их часто используют в роботах и принтерах.
Шаговые двигатели бывают разных размеров. Наиболее распространённые в 3D-принтерах — NEMA 14, NEMA 17, NEMA 23 и NEMA 24.
2. Станки с ЧПУ
Шаговые двигатели являются альтернативой серводвигателям и могут использоваться для питания большинства типов станков с ЧПУ. Системы ЧПУ применяются в широком спектре производственных процессов, где предварительно запрограммированное программное обеспечение управляет работой и физическим перемещением станков в заводских и производственных условиях.Хотя шаговые двигатели в системах ЧПУ часто рассматриваются как более «экономичная» альтернатива серводвигателям, это упрощение, основанное на устаревших технологических знаниях, и сегодня оно не всегда точно соответствует действительности. Шаговые двигатели, как правило, дешевле серводвигателей при той же мощности, но современные версии столь же универсальны. В результате шаговые двигатели находят более широкое применение и используются в более широком спектре машин и систем: от станков до настольных компьютеров и автомобилей.
Шаговые двигатели с ЧПУ имеют решающее преимущество перед серводвигателями, поскольку им не требуются энкодеры. Серводвигатели изначально сложнее в понимании и эксплуатации, чем шаговые двигатели, отчасти потому, что они оснащены энкодерами, которые более подвержены отказам, чем многие другие компоненты надёжных серводвигателей. Шаговым двигателям не требуются энкодеры, что теоретически делает их более надёжными, чем серводвигатели.
Кроме того, шаговые двигатели также являются бесщёточными (в отличие от серводвигателей), что означает, что они не требуют регулярной замены, пока подшипники находятся в хорошем рабочем состоянии.
3. Объективы для камер
Шаговые двигатели широко используются в различных приложениях в сфере высокотехнологичных камер. Они могут использоваться для управления высокоточными внутренними компонентами, такими как автоматическая фокусировка и нас
